Gecko Error/Reset Controller
The Gecko G320 and G340 controllers are fabulous devices, but have one
minor little annoyance - the Error/Reset pin. The operation of this
pin is somewhat confusing, and the usage even more so.
The newest version of the Gecko 3x0 drives ease the use of this pin
by allowing a person to wire all the pins in a system together, but this
is still, in my opinion, an incomplete and inflexible solution.
Looking at the various circuits available from a number of sources,
I decided that none of them precisely suited my needs and so decided to
create yet another design. Considering that the problem was mostly
one of logic and only partly electronics, I decided to use
a microcontroller.
My design goals were these.
-
Automatically provide the 5 second reset required at powerup.
-
Fault all the channels should a single active channel fault.
-
Provide a means to disable all the motors without having to resort to a
poweroff.
-
Provide a means to disable a single channel without disturbing the the
fault detection logic.
-
In the event of a fault, indicate which channel caused the fault.
-
Allow an EStop input to disable the Geckos
-
Allow an EStop input to disable the motors. ( Not the same thing as #6
! )
-
Send a signal to the controlling PC should a fault occur.
-
Automatically control relays for both safety reasons, as well as providing
dynamic braking capabilities.
At the end, I came up with a reasonably simple design that does all of
the above, which I called the GERC, for Gecko Error Reset Controller.
Information on this original device, including all that's required to allow
a person to build their own from scratch, can be found here.
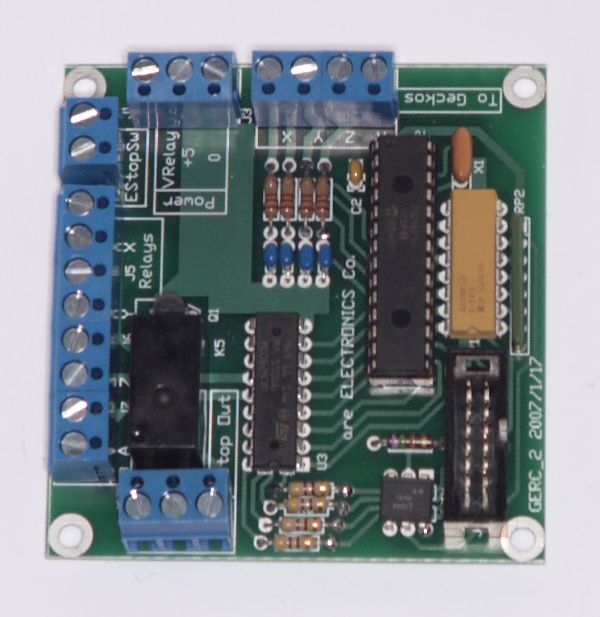
After a couple of years, and based upon user requests, a couple of small
enhancements were made, resulting in Rev 2, shown below. These enhancements
allowed the GERC to send an EStop signal to almost any device via the contacts
of a SPDT relay, and uses screw terminals for electrical connections.
GERC R2


(Click either image for a larger view.)
A complete manual, including schematics, can be found here.
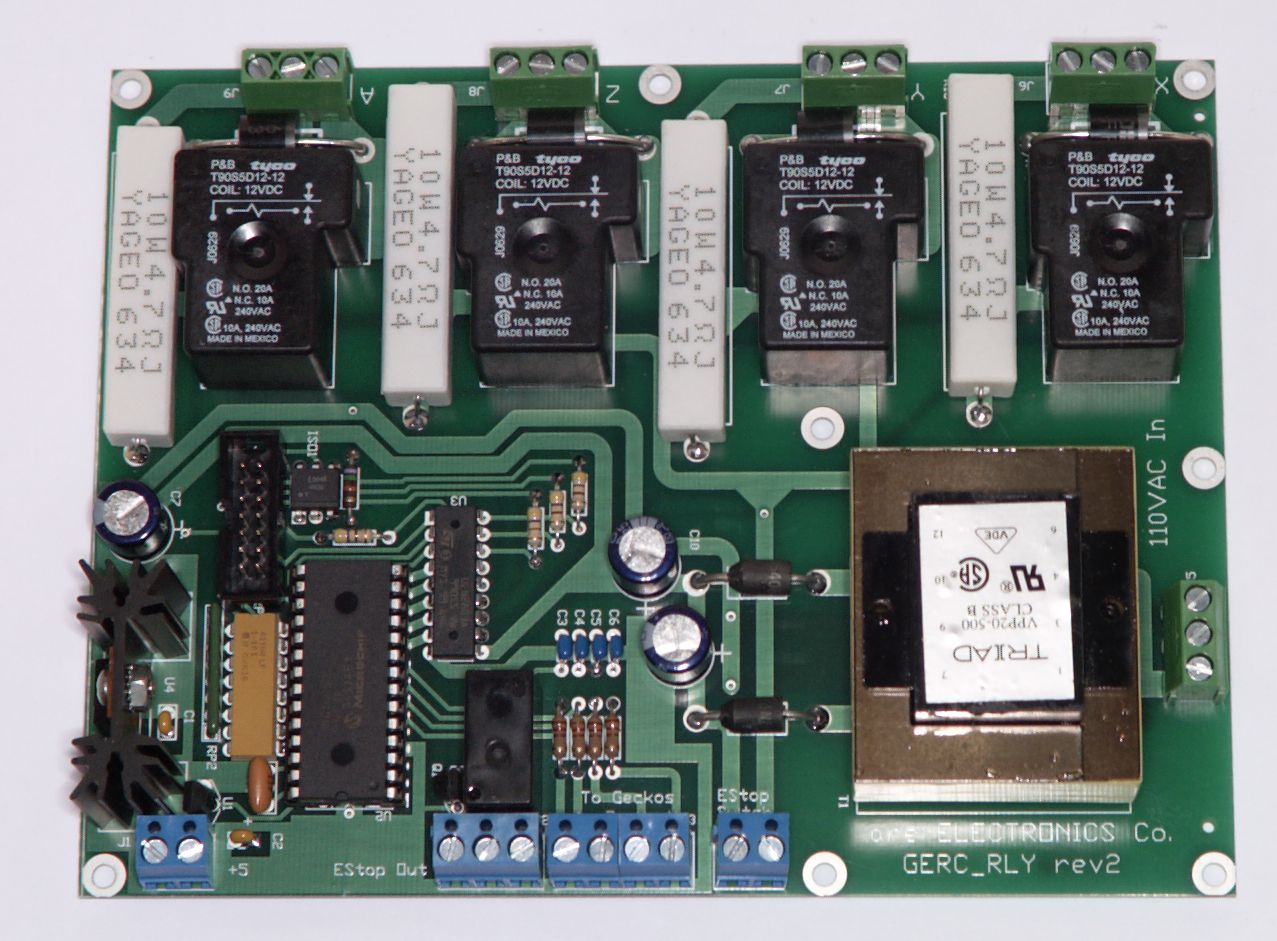
GERC_RLY
The GERC requires, at a minimum, an external source of 5 volts to power
the microcontroller. To make full use of the board's capabilities to safeguard
against a "crash", external relays, diodes and power resistors are also
needed, as well as an additional voltage source to drive those relays.
So a second version of the GERC was produced, the GERC_RLY, that contains
all of the above in a single board.


(Click either image for a larger view.)
A complete manual for the "relays included" version, including schematics,
can be found here.
Differences between the GERC and GERC_RLY
The difference is that the GERC requires a person to source relays, diodes,
braking resistors and a power supply, and then wire it all up. The
GERC_RLY saves a person all the trouble, but is of course more expensive.
Other than that, there really aren't any differences. Both use exactly
the same parts in the logic circuitry, including exactly the same code
in the microcontroller.
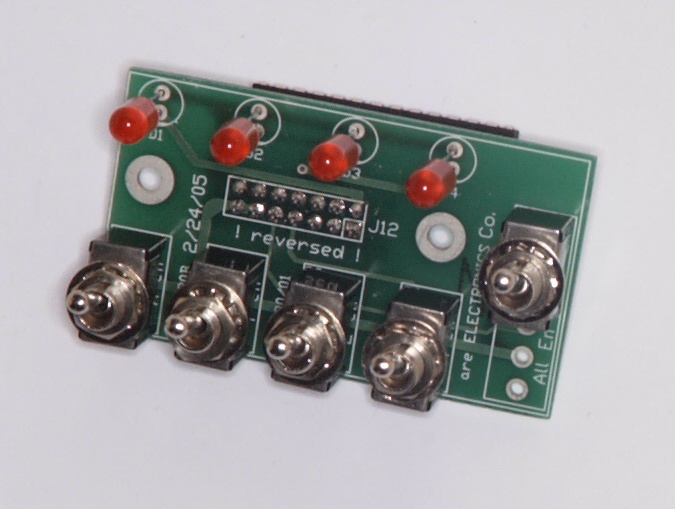
Human Interface
Individual axes are enabled and disabled, and the whole device reset, from
switches attached to a PCB that is itself normally mounted to the front
panel of your controller. That same PCB also has LEDs on it supplying
status messages. An LED glowing solidly indicates an enabled axis,
a single LED blinking rapidly indicates that the Gecko controlling that
axis has faulted. All LEDs blinking very slowly indicates that the
GERC is resetting the Geckos, and all LEDS blinking very rapidly indicates
an EStop event has been detected (either the "Big Red Button" has been
pressed or a limit switch has been activated).


The switch board is available as shown above, with 1/4" mini switches
soldered directly to the PCB, for a nice, compact unit (perhaps remotely
connected to the main controller) or with conventional 7/16" switches connected
via 6" of colour-coded wire, as shown below.

Back to Index Pricing